Arduino-controlled self-balancing dicycle
|
|
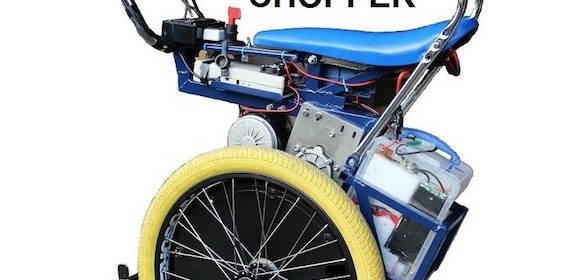
XenonJohn’s has made this two-wheeled self-balancing scooter, which is Arduino-controlled and uses the ADXL345 accelerometer and the ITG-3200 MEMS gyro together to form an Inertial Measurement Unit (IMU). The Arduino MEGA board analyses the outputs from the IMU and signals the Sabertooth dual 25A motor driver (which in turn drives two 24V brushed gear motors) to maintain the balance while you are riding. A 4×20 character LCD provides you status updates during the ride. The motors are powered with a 24V battery, while the control circuit including the Arduino receives the power from six AA batteries.

Arduino-controlled dicycle
|
|