MyComm: a portable satellite messenger

MyComm is a portable satellite messenger currently being designed by John Grant. It provides true global messaging to keep you connected to your family all the time and from anywhere on Earth beyond the reach of WiFi and GSM networks. Yes, it uses a satellite network for sending and receiving text messages from any point on Earth, including the polar regions.
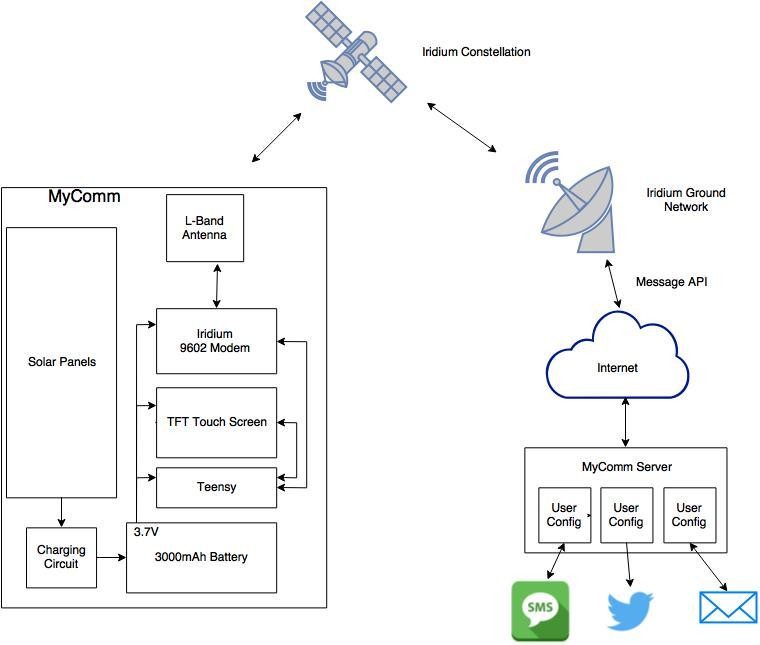
MyComm uses Iridium Satellite Network for global communication
The satellite modem used in his project is RockBLOCK Mk2, that operates in L-band and therefore requires a clear-sky line-of-sight for reliable communication. The message lengths are limited to 340 bytes for transmission and 270 bytes for reception per message.
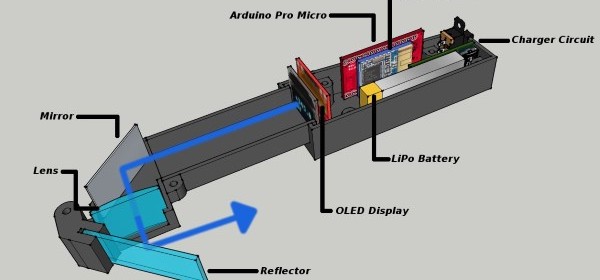
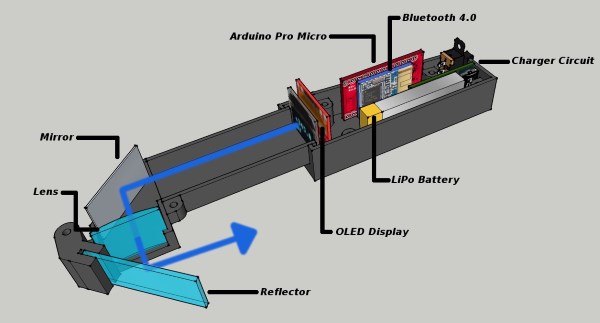
This is the portable device someone would carry around with them. Powered by battery which can be charged via solar it is roughly the size of a large smart phone with a 2.8” TFT touch screen as the user interface. A Teensy 3.1 micro controller is the main brains of the unit handling user input, contacts, message content and control of the satellite modem. The satellite modem is an Iridium 9602/3 Transceiver, allowing two way communication over the Iridium Satellite Network using the Iridium Short Burst Data Service.