Rubik’s cube solver
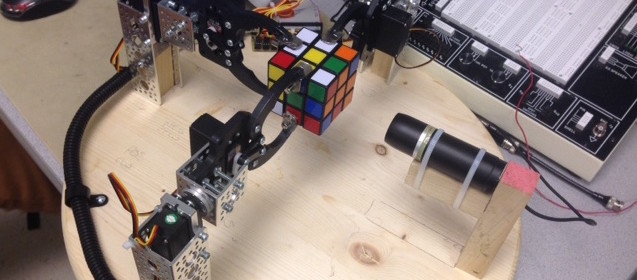
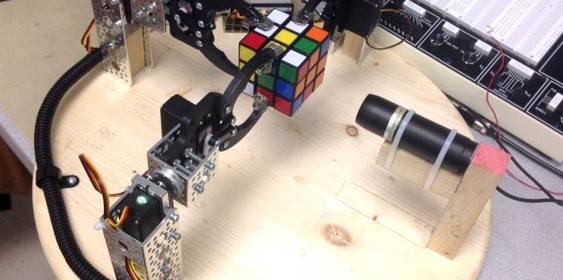
Alex Whiteway, Sungjoon Park, and Rameez Qurashi (students at Cornell) designed FPGA-driven mechanical arms to solve Rubik’s cube. They used three mechanical arms to hold and rotate the cube. Each arm consists of two servo motors: one for rotating the arm and another for controlling the grip of a mechanical claw attached to the arm. With the help of the arms, a camera scans all six faces of the cube. The faces information is passed into Rubik’s cube solving algorithm, which then determines the moves needed to solve the cube. The move instructions are fed to the FPGA, which then generates PWM signals for the
Read more