The SolarSurfer is a neat concept of building a solar-powered robotic surfboard submitted to the 2014 Hackaday Prize by Rusty Jehangir and his team at BlueRobotics. It’w built using an 8 feet surfboard and is powered by a 120 W solar panel and a 12V lead acid battery. It’s also equipped with a GPS system, satellite modem, and sensors that collect ocean temperature and pH values during the journey.
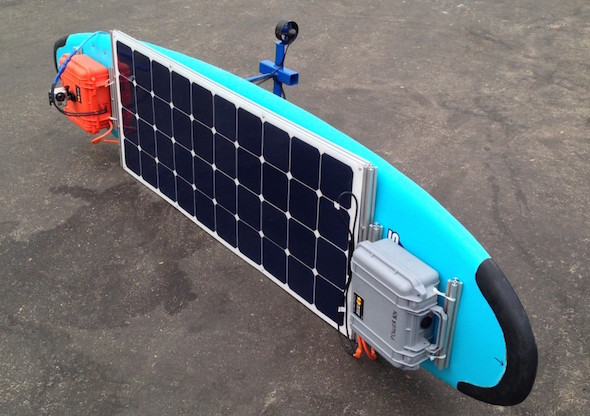
Solar-powered autonomous surfboard
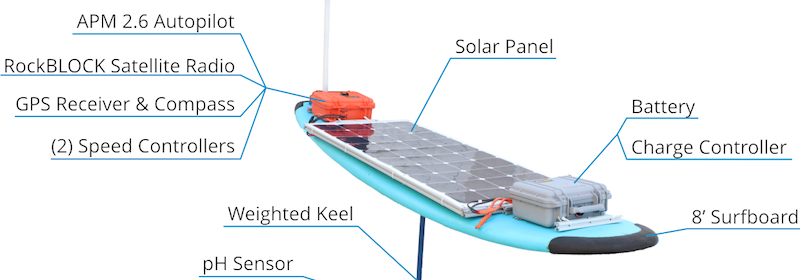
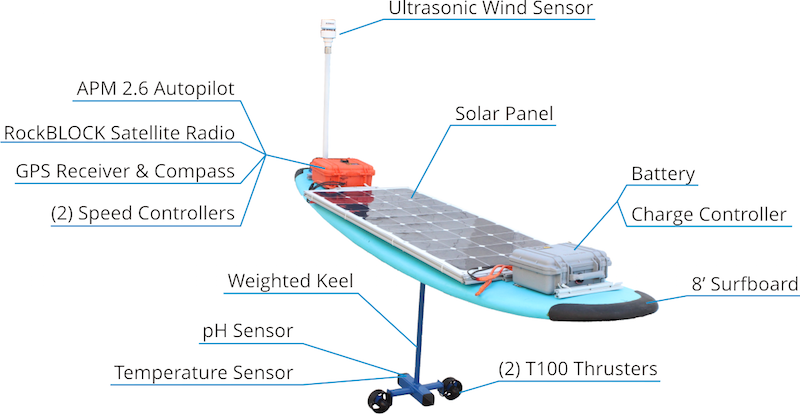
The surfer is guided by a 3D Robotics APM2.6 with a uBlox GPS. A RockBLOCK satellite radio from Rock Seven let’s us communicate back and forth with the SolarSurfer to monitor its position, status, and update its course. Temperature and pH sensors collect useful ocean data along the way.
The ocean is a harsh place – corrosive saltwater, intense sunlight, constant motion, and life everywhere. There’s lots of challenges to overcome and a lot of potential for awesomeness.
The project is open-source and we’d love your input and contribution! The software is available on our Github page and licensed under the GPL license. We leverage a lot of inspiration from other open source projects like ArduPlane and ArduCopter.
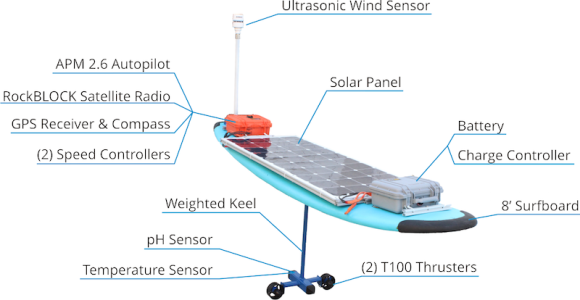
SolarSurfer components