Selfiebot: An autonomous photo capturing system
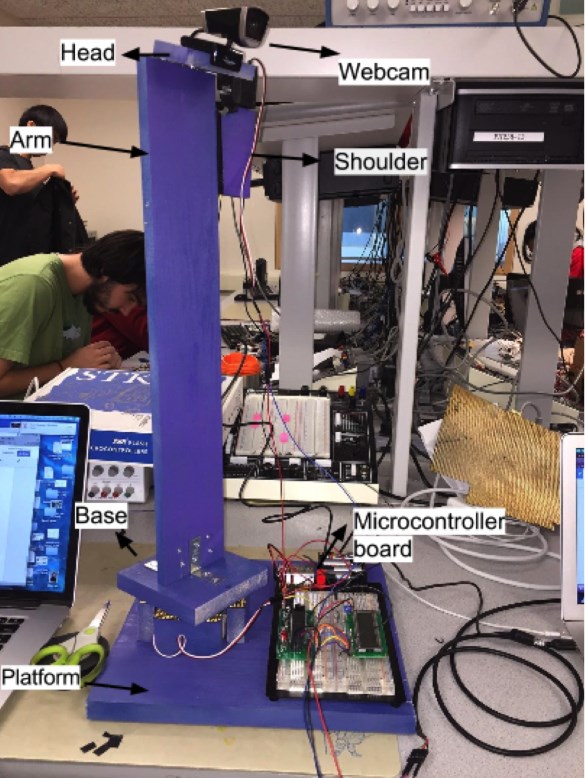
Two Cornell University students, Michael Wang and Jennifer Qian, have built Selfiebot, a personal photo companion that will capture your special moments autonomously. It consists of a physical selfie robot unit with camera holder (webcam in this example) that can pan and tilt the camera for proper positioning, and a control module residing in a laptop computer that relays pan and tilt commands to the robot based on the feedback received from the camera. The user gets control of various settings such as image properties, centering properties, and photo taking parameters.
Michael and Jennifer write,
We have designed and constructed an autonomous photo capturing system that detects and tracks faces, centers subjects in the frame, and takes pictures. Since the most straightforward application for our robot is to take pictures of oneself without the aid of others, we have fittingly dubbed our system the “Selfiebot”. When operating our device, the user may specify a variety of preferences through its simple GUI, including contrast, brightness, centering options, the number of people to capture, and the number of pictures to take.
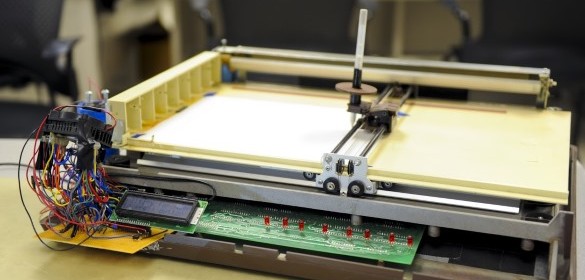
Our system processes images taken from a webcam on a laptop computer, using facial detection to track subjects, and forms movement commands to center the subjects based on face positions. The laptop sends the commands to an ATmega1284 microcontroller via serial communication, and the microcontroller controls the movement of two servos on the robot. These two servos correspond with panning and tilting actions, allowing for two dimensional movement of the camera. Feedback from the camera is used to continuously update movement.
Selfiebot personal photo companion
Check out there demo video below.