Arduino ultrasonic radar

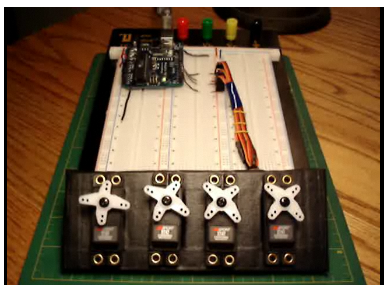
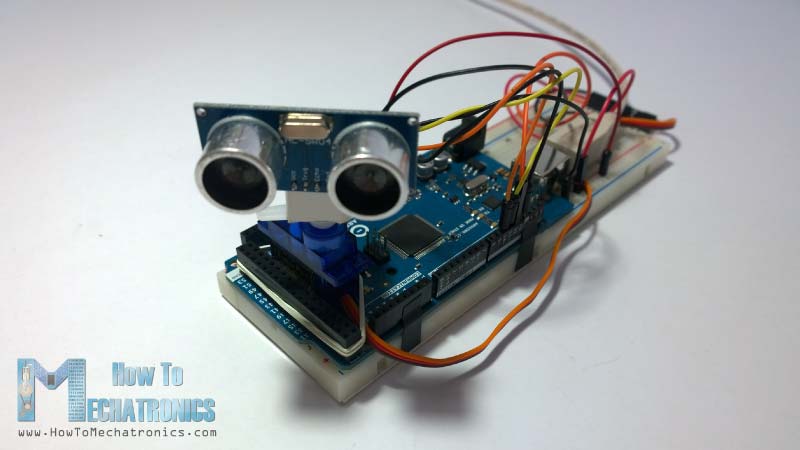
Dejan Nedelkovski from How To Mechatronics has a very nice tutorial about making an ultrasonic radar using Arduino and Processing platforms. The project requires an HC-SR04 ranging sensor module mounted on a servo motor to scan the surrounding. The Arduino board control the scan position, as well as receives the ranging sensor output. The received echo data is post-processed on a computer using a Processing-based application and the radar signature is displayed on the computer screen.
Arduino ultrasonic radar
See this radar in action in the following video.