Wifi controlled FPV rover
|
|
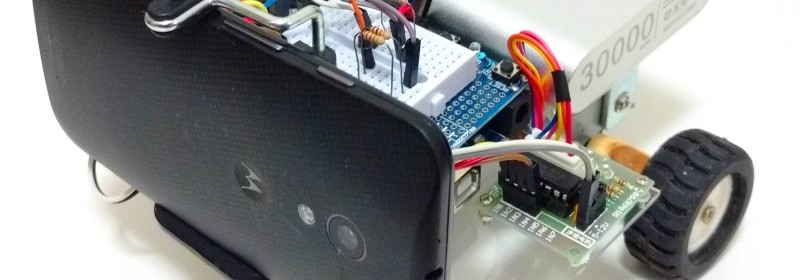
First Person View (FPV), also known as video piloting, provides a more exciting driver’s viewpoint for controlling a RC rover by mounting a video camera. This FPV two-wheeled robotic rover is controlled over a WiFi network via any internet browser using an HTML-based control interface. It features an Arduino Uno board that controls the movement of the rover by driving two stepper motors. Arduino gets the WiFi capability with the help of an ESP-01 module (ESP8266 board). The communication between the Arduino and ESP8266 is through a serial interface. An Android smartphone is mounted at the front of the rover for live audio/video broadcasting to the operator’s control interface.
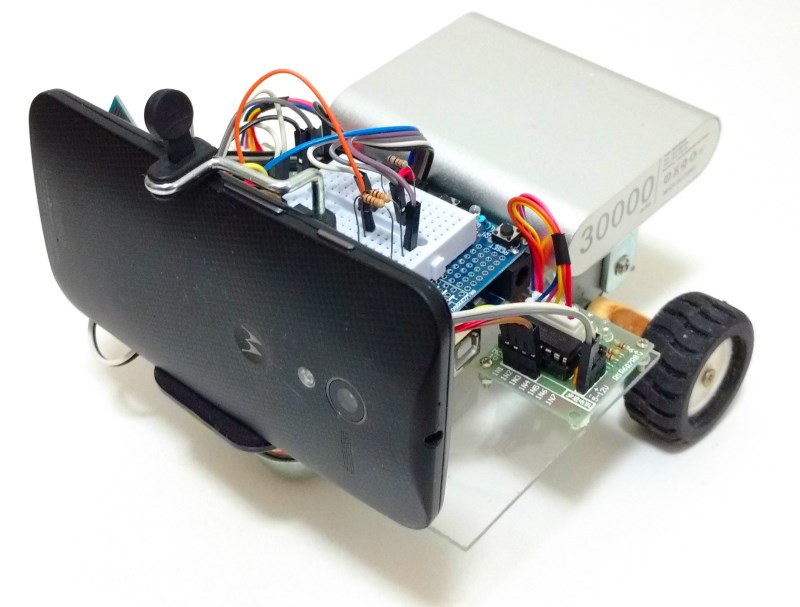
DIY FPV rover
When the Arduino is restarted, it will try to connect your wi-fi network automatically. Use the Serial Monitor to check if the connection was successfull, and to obtain which IP was assigned to your ESP-8266 by your router. Open the html file in an internet browser (Firefox) and inform this IP address in the textbox.
You might also user other means to find out which IP address you router assigned to your device.
Disconnect the the Arduino Uno from your computer and connect it to the power bank. Wait for it to connect again.
Launch IP Webcam app in the smartphone attached to the robot. Type the video/audio IP on your control interface and connect to the server and you’ll be ready to go. You might need to reduce the resolution of the video in the app to reduce the delay between during the transmission.
|
|