Controlling servos with hand motion
|
|
Justin Platz and Kurt Clothier from Pubnub illustrates how to control a physical object with the motion of two hands. They used Raspberry Pi and the Leap Motion controller for this purpose.
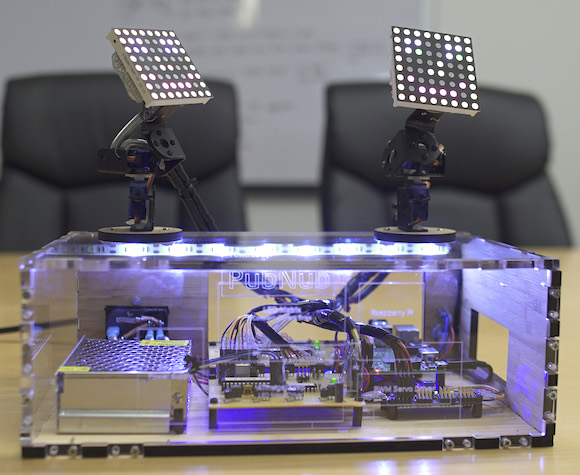
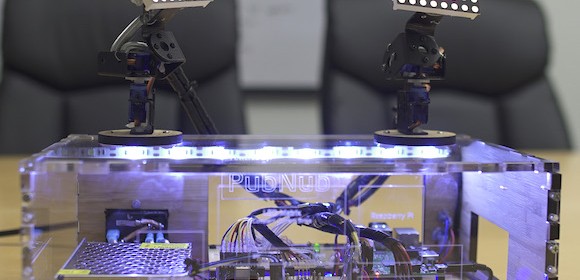
Controlling servos with hand motion
The two servos mirror the movement of the user’s two individual hands. Attached to the servos are 8×8 RGB LED Matrices, which react to each finger movement on your hand. The Leap Motion communicates directly with the Raspberry Pi via PubNub Data Streams with minimal latency, and the Raspberry Pi then drives the servos.
Leap Motion is a powerful device equipped with two monochromatic IR cameras and three infrared LEDs. In this project, the Leap Motion is just going to capture the pitch and yaw of the user’s hands and publish them to a channel via PubNub. Attributes like pitch, yaw and roll of hands are all pre-built into the Leap Motion SDK.
To recreate realtime mirroring, the Leap Motion publishes messages 20x a second with information about each of your hands and all of your fingers to PubNub. On the other end, our Raspberry Pi is subscribed to the same channel and parses these messages to control the servos and the lights.
|
|
Pingback: Controlling servos with hand motion - Arduino collector blog