Voice controlled robotic vehicle
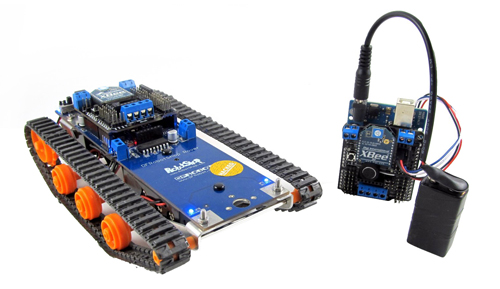
In this video, Carlos Asamat describes an Arduino driven speech controlled robotic vehicle. The required components and modules to construct this robot can be purchased from RobotShop. The voice commands are processed through a speech recognition hardware module and are transferred to the vehicle through Xbee RF communication modules. The speech recognition module is controlled through an Arduino Uno. The robotic vehicle to be controlled is the DFRobotShop Rover,which is a very versatile programmable robot platform. Besides the mechanical structure of the robot, the DFRobotShop Rover PCB also incorporates a standard Arduino Duemilanove (surface mount ATMega328), L293B motor driver, voltage regulator and an additional prototyping
Read more