Open-source ARM Pro Mini
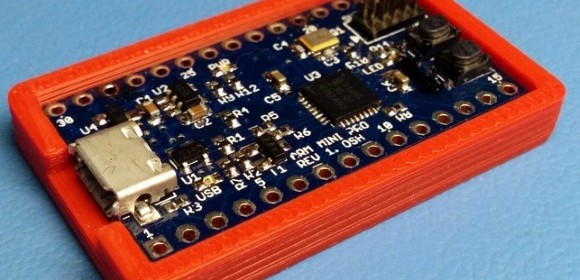
Zapta has shared the design files on github for his ARM PRO MINI, which is an open source ARM M0 microcontroller development board that could be handy for quick prototyping and as a starting point for your own ARM based custom designs.
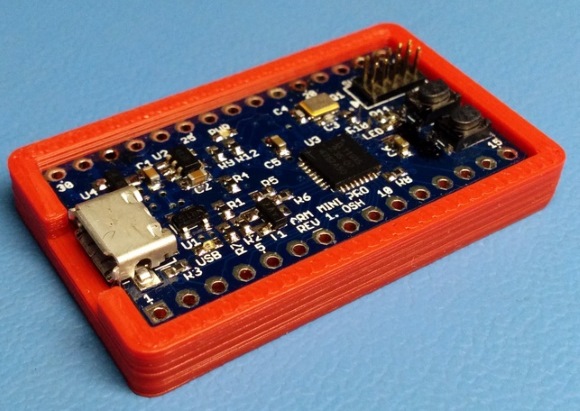
Arm Pro Mini board
Highlights
- Prototyping friendly. Compatible with standard soldieries breadboards and can be soldered to a standard 0.1” proto board.
- Straight forward barebone design. Customize for your own PCB design by selecting the portions of the circuit you need.
- Single package install of the free and fully feature IDE (NXP Eclipse/LPCXpresso).
- Zero software installation when using with the mbed.org online IDE.
- Full support of Windows, Mac OSX and Linux.
- Easy firmware upgrade using a file drag and drop. Programmers and adapters are not required, even if you are bringing up your own board!
- Supports optional debuggers (such as the OM13014,598) for single stepping and full debugging capabilities.
- I/O library and a hello world example (with serial printing over USB, parallel port io, blinking LED, and timing).
- No-nonsense open source license (no commercial restrictions, sharing and attribution not required).