Rubik’s cube solver
|
|
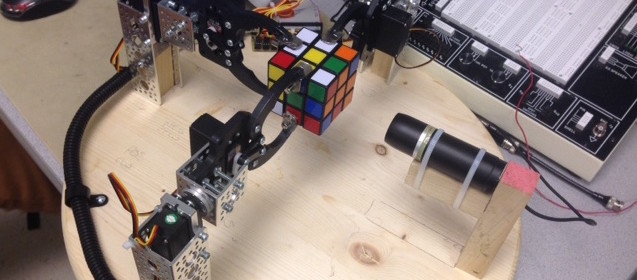
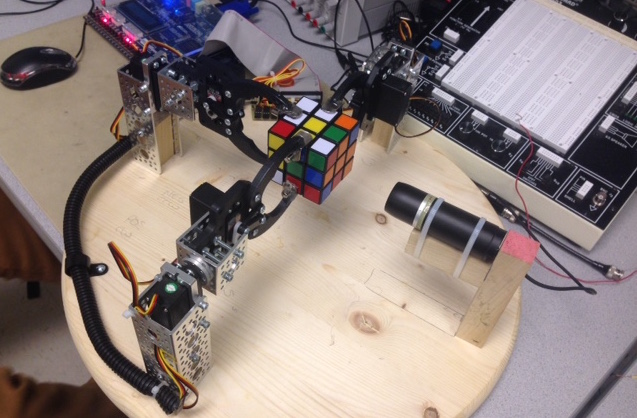
Alex Whiteway, Sungjoon Park, and Rameez Qurashi (students at Cornell) designed FPGA-driven mechanical arms to solve Rubik’s cube. They used three mechanical arms to hold and rotate the cube. Each arm consists of two servo motors: one for rotating the arm and another for controlling the grip of a mechanical claw attached to the arm. With the help of the arms, a camera scans all six faces of the cube. The faces information is passed into Rubik’s cube solving algorithm, which then determines the moves needed to solve the cube. The move instructions are fed to the FPGA, which then generates PWM signals for the servos to rotate the cube accordingly, until the cube is solved. The robot was their final project design for Prof. Bruce Land’s ECE 5760 course on Advanced Microcontroller Design and system-on-chip.
Rubik’s cube solver
They write,
The results did not quite meet our expectations (100% solve rate, 100% scanning accuracy, a solve time of under 3 minutes not including scanning time). We met the solve rate criteria and were close with scanning accuracy, but our design is much slower than our original goal solve time. Given more time, we would like to implement more efficient algorithms in order to reduce solve time even further. The most efficient algorithms solve a cube in 20 moves or less, however these are difficult to implement in such a short amount of time. We also would like to increase our scanning accuracy to 100%. With our current setup, the whole cube has to be rescanned if the scanned cube is incorrect. We will change this to only rescan those faces which contain a color that is detected more than expected, or to infer aberrant cubies based on the color of its neighbors. We also would have liked to add a fourth arm since it will reduce the amount of actions needed by the claws to perform a move which would decrease total solving time, and reduce the scanning time since we could scan the whole cube with only 6 rotations. Though the solver did not meet all expectations, it performs reasonably well.
|
|