Experimenter’s board for enhanced mid-range PIC microcontrollers (PIC16F1827 and PIC16F1847)
|
|
The PIC16F628A has always been my first choice for microcontroller-based projects. It is simple, inexpensive, and easily available. Due to its compact size (18 pins) it occupies lesser space on the circuit board, and meanwhile, it is powerful enough to serve most of a hobbyist’s needs. It is a very well accepted successor of the classic PIC16x84, and therefore, the tons of resources available for PIC16x84 on the internet and books can also be used for PIC16F628A. Last month, Microchip Technology Inc. announced the latest addition to its Enhanced Mid-Range core 8-bit PIC® microcontroller (MCU) family by introducing PIC16F(LF)1847. When I went through its features I was tempted. The newly released PIC16F1847 seems to be the most powerful successor of the 18-pin PIC16F series of microcontrollers. It is pin-compatible with PIC16F628A but equipped with lot more peripherals and enhanced features. It has 14Kbytes of on-chip flash memory and 1KByte of data RAM. Now I never have to switch to a higher-end or bigger size PIC just because of the shortage of program memory or RAM. This would probably be the first 18-pin PIC device of the mid-range 8-bit family with so much of RAM and flash memory. Before this, Microchip also released PIC16F1827, similar to PIC16F1847 in peripherals and other features but with lesser program memory. I thought of doing some experiments with these two members of enhanced mid-range 8-bit PIC family and so decided to make my own development board for PIC16F1827/47. Making a development board is a one-time effort, and life becomes much easier after that.

Development board for PIC16F1827/47
Theory
A development board is very helpful while exploring the different features of any microcontroller. It saves your time of wiring the circuit on a breadboard to do an experiment and later modify it for another experiment once you finished with the previous one, and so on. The development board allows you to perform any experiment or develop a project with minimum amount of effort and time. There is no standard circuit diagram for a microcontroller development board. It’s up to you what features you want on the board. Here’s what I decided to have on my board:
- An ICSP header to connect PIC16F1847 to PICkit3
- On-board voltage regulator (+5 V)
- A HD44780 based character LCD display
- 8 LEDs to read the status of output pins
- 6 Tact switches for providing inputs
- A potentiometer for providing analog input
- TTL to RS232 voltage level translation and vice-versa for serial interface
- An external serial EEPROM (24LC512)
- A GPIO expander (MCP23008)
- Quad OpAmp IC (MCP602) for signal conditioning
- Digital potentiometers (DS1868)
- Programmable gain amplifiers (MCP6S92)
- A temperature sensor (TC74A0)
- A mini breadboard
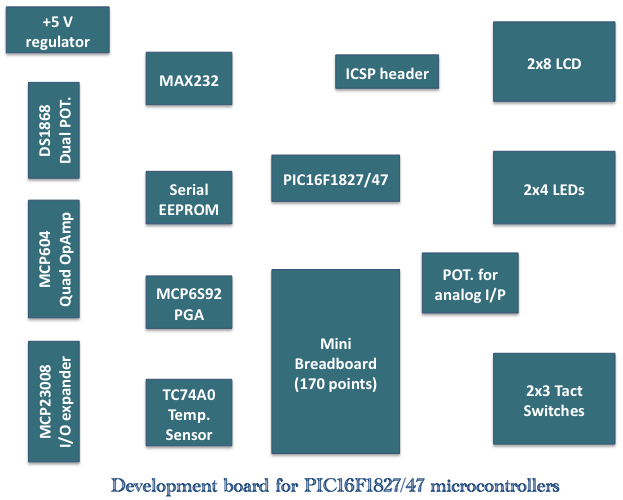
The layout of these components on the board is shown below. I soldered these components on a 18 cm x 12.8 cm experimenters circuit board. The PIC16F1827/47 is peripheral rich and each I/O pin serves multiple functions. Therefore, none of the I/O pins of PIC16F1827/47 are dedicatedly connected to any other peripheral components. Rather, individual pins are made easily accessible through double row female headers so that we can connect every peripheral device to whatever pins of PIC16F1847 we want to.

Layout of the components

Finished development board (Click to see the bigger picture)
I printed labels on paper and stuck those on the board so that it would be easier to identify which pins go to what headers. The board can be powered from a 9V battery and the on-board regulator (LM7805) generates +5V power supply for the microcontroller and peripherals. The circuit diagram is pretty simple. The microcontroller and the peripherals’ power supply pins are connected to Vcc and Gnd, whereas the operational pins are connected to headers. There are some other pins besides the power supply, which are also needed to be connected to either Vcc or Gnd. For example, the external hardware address pins of I2C slave devices. The figure below shows the connection diagram of PIC16F1827/47 and header pins.

All port pins are accessible through female headers
You can see there is a jumper selection for RA5/MCLR pin, which can be used as external reset or a general purpose input pin (RA5). The system clock for PIC16F1827/47 can be derived using an external ceramic resonator. There is a 3-pin slot for that. Taking the resonator out of the slot and using the internal clock source, the RA6 and RA7 pins can be used as general purpose input and output pins.
There are three I2C devices on the board: MCP23008 (8-bit port expander from Microchip), TC74 (temperature sensor from Microchip), and 24LC512 (EEPROM from Microchip). The external address pins of MCP23008 and 24LC512 are grounded. The TC74 temperature sensor does not have any external address pins. The figure below shows the connections for these three devices and their corresponding 7-bit slave addresses.

Connection of various I2C devices on the board
Similarly, the circuit diagram shown below describes the connections for UART interface, MCP604 (Quad OpAmp), DS1868 (digital potentiometer), and MCP6S92 (programmable gain amplifier). The translation between TTL and RS232 voltage levels is achieved using MAX232 chip that requires four external capacitors (each 1 uF) for its internal charge pumps. MCP604 is a quad OpAmp IC from Microchip that provides low bias current, high-speed operation, high open-loop gain and rail-to-rail output swing. DS1868 is a dual channel digital potentiometers with 256 wiper positions. The two potentiometers can be used independently or stacked for increased total resistance and number of taps. Communication takes place through a 3-wire serial port interface. The MCP6S92 is a 2-channel analog Programmable Gain Amplifier from Microchip. It can be configured for gains from 1 to 32 and the input multiplexer can select one of the two channels through a SPI port. It is optimized for high-speed, low offset voltage and single-supply operation with rail-to-rail input and output capability.

UART, OpAmp, digital potentiometer, and PGA connections
Next comes the circuit diagram for power supply, tact switches, LCD, and LEDs. For regulated +5V power supply, LM7805 IC is used. A general purpose diode is connected in series with the input of LM7805 for protecting against the wrong polarity of battery input. A 6-pin female header provides access to the LCD data and control pins. Tact switches are configured as active low, i.e, under normal conditions the tact switch output is high. A separate 5K potentiometer on the board will serve as a source of analog voltage.

Regulated power supply, LCD, LEDs and tact switches on the boar

Connecting PICkit3 to the board

Bottom side of the board
Testing of the board
Now the board is complete and ready for testing, which will be done in two steps. In the first step, we will test if the LCD, LEDs, and tact switches are properly wired on the board. We will connect them to PORTA and PORTB of PIC16F1827. The microcontroller will run at 500 KHz internal clock, so you can take the ceramic resonator out from its slot. You should use jumper wires to make the following connections.
- LCD: RS -> RA6, E -> RA7, D4 -> RA0, D5 -> RA1, D6 -> RA2, D7 -> RA7
- LEDs: Connect the eight LEDs to PORTB (RB0-RB7)
- Tact switches: Connect SW1 through SW6 to RB0-RB5 port pins

Setup for I/O test
We will write a test program in mikroC Pro for PIC that will first initialize the character LCD and send a test message to display. You can vary the contrast of the display through the LCD contrast potentiometer on the board. The PORTB is initially defined as output port and all the LEDs are turned on sequentially in forward and reverse direction. Next, the PORTB direction is changed to input to read the inputs from tact switches. All the six keys are tested by pressing them individually. The microcontroller sends a number between 1-6 to LCD for each key press. This completes the testing of the connections of the I/O components on the right side of the board.
Next, we will test the UART port and I2C devices. The microcontroller will use an external 16.0 MHz resonator for its system clock. Connect the RB1 and RB2 pins to TTL Rx and Tx terminals of the UART module. The RS232 pins (Tx, Rx, and Gnd) must be connected to corresponding terminals of PC’s serial port. The Hyperterminal window on the PC will serve as the display module for this test. The board will send a message to the terminal window, “Enter a Number” and waits for a key to be pressed on the keyboard. When a key is pressed, the microcontroller will read it, and echo it back to the Hyperterminal window. Then, the microcontroller will test the presence of all I2C devices on the board. I2C communication will be implemented in software through RB4 and RB5 pins. So, connect RB4 and RB5 to SCL and SDA header pins, respectively. The PIC16F1827 will send the slave addresses of the three I2C devices sequentially. If the device acknowledges, the microcontroller will know about its presence. Then, the PIC16F1827 also reads the temperature value from TC74 sensor and displays it on the Hyperterminal window. This completes the second test.
Download the source and HEX files for tests 1 and 2

Setup for UART and I2C communication test

Hyperterminal window output
I will be posting more experiments on this board soon. For now, watch this video of testing the board.
Update: Here are some experiments done with this board.
- How to use the DS1868 digital potentiometer with a PIC microcontroller
- Using Fixed Voltage Reference (FVR) for A/D conversion in enhanced mid-range PIC microcontrollers
Appendix

Pin diagrams of ICs (1)

Pin diagrams of ICs (2)
|
|
Pls I am having issues programming pic16f1847 with pickit3 standalone version.pls kindly help me.thanks
I tried to figure out a detailed list of the parts of this circuit but i couldnt somebody can help me plsss i need that i lot. Can somebody write the pieces on it with every single detail. Like the led s ohm or something. Something that i can find when i write the same thing to google. So please help me with that.!!!!!!!!!!!!!!!!!!!!!!!! If you dont thanks anyway. At least read that and know somebody need an immediatly help.!!!!!!!
Your design is very useful. Thanks!
Do you have found –or wrote– a bootloader for this chips? (16F1827/1847).
I think this useful feature is the best choice to work easy and fast in prototyping with this kind of microcontrollers.
Pingback: Enhanced Board for Microcontrollers | HACKOLOG - Amazing Hacks and Mods
Pingback: Making the most of your diy development boards - Free Plans, Hacks, Howto's and other DIY stuff - Free Plans Online
Pingback: Making the most of your diy development boards | You've been blogged!
Pingback: Making the most of your diy development boards | The Depot of Talk
Pingback: Making the most of your diy development boards - Hack a Day
I posted this on a different (wrong) site before. Are there experiments or tutorials on using the F1827 with this board? I like the board and would like to learn more about the chip. Thanks Aaron
Aaron,
I haven’t written basic tutorials on this board, but do have few posts here:
http://embedded-lab.com/blog/?p=2969
http://embedded-lab.com/blog/?p=3045
You can repeat my PIC tutorials (http://embedded-lab.com/blog/?page_id=26) with this board too.
Really like this setup. Where did you get the circuit board and do you have pictures of the underside? Thank You…
Hey Jeff,
I used ‘Experimenters Board Large – Phenolic’ from HERE. I will post the picture of the underside soon.
The schematic with caption “All port pins are accessible through female headers” has pins 12 and 13 mixed up. Pin 12 should connect to ICSPCLK and pin 13 to ICSPDAT.
See the figure with caption “Pin diagrams of ICs (1)” to confirm.
@ Bolke
You were right. I corrected the error. Thank you.
i am newbie in microcontroller world i want to purchase pickit 3 in india so will u please tell me where can i find it
Contact Microchip sales office or distributors in India:
http://www.microchip.com/stellent/idcplg?IdcService=SS_GET_PAGE&nodeId=1975&country=India
Pingback: Electronics-Lab.com Blog » Blog Archive » Development board for newly released PIC16F1847 microcontroller