Tinkering TI MSP430F5529

|
|
USCI – SPI – I2C Example 1
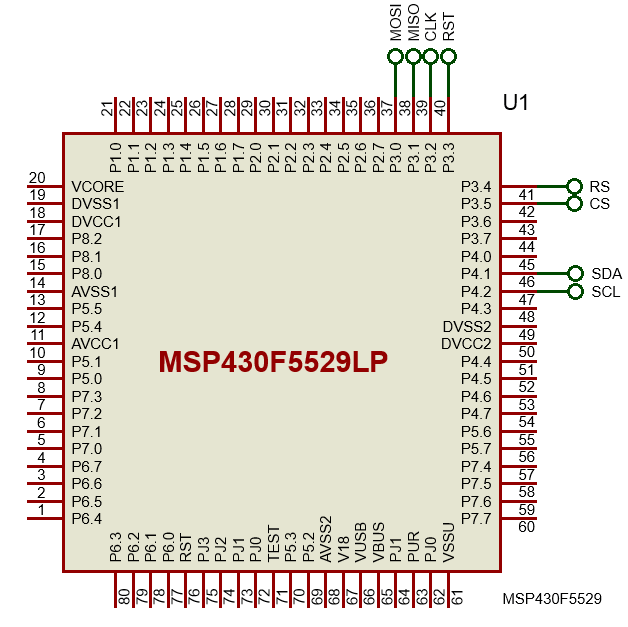
In this first USCI example, we will see how we can use USCI modules to read a MMA7455L accelerometer in I2C mode and project its readings on a SPI-based ST7735 TFT display. This is an over simplified example and a rudimentary one although it may appear that lot of coding has been done here. Here, the accelerometer’s axes readings are plotted on the TFT display.
Code Example
MMA7455L.h
#include "driverlib.h"
#include "delay.h"
#define I2C_port GPIO_PORT_P4
#define I2C_SDA_pin GPIO_PIN1
#define I2C_SCL_pin GPIO_PIN2
#define MMA7455L_address 0x1D
#define MMA7455L_X_out_L 0x00
#define MMA7455L_X_out_H 0x01
#define MMA7455L_Y_out_L 0x02
#define MMA7455L_Y_out_H 0x03
#define MMA7455L_Z_out_L 0x04
#define MMA7455L_Z_out_H 0x05
#define MMA7455L_X_out 0x06
#define MMA7455L_Y_out 0x07
#define MMA7455L_Z_out 0x08
#define MMA7455L_STATUS 0x09
#define MMA7455L_DETSRC 0x0A
#define MMA7455L_TOUT 0x0B
#define MMA7455L_RSV1 0x0C
#define MMA7455L_I2C_Address 0x0D
#define MMA7455L_User_Info 0x0E
#define MMA7455L_Who_Am_I 0x0F
#define MMA7455L_X_offset_L 0x10
#define MMA7455L_X_offset_H 0x11
#define MMA7455L_Y_offset_L 0x12
#define MMA7455L_Y_offset_H 0x13
#define MMA7455L_Z_offset_L 0x14
#define MMA7455L_Z_offset_H 0x15
#define MMA7455L_MCTL 0x16
#define MMA7455L_INTRST 0x17
#define MMA7455L_CTL1 0x18
#define MMA7455L_CTL2 0x19
#define MMA7455L_LDTH 0x1A
#define MMA7455L_PDTH 0x1B
#define MMA7455L_PW 0x1C
#define MMA7455L_LT 0x1D
#define MMA7455L_TW 0x1E
#define MMA7455L_RSV2 0x1F
#define MMA_7455_2G_MODE 0x05
#define MMA_7455_4G_MODE 0x09
#define MMA_7455_8G_MODE 0x01
void I2C_DIO_init(void);
void USCI_I2C_init(void);
void MMA7455L_init(void);
void MMA7455L_write_byte(unsigned char address, unsigned char value);
void MMA7455L_write_word(unsigned char address, unsigned int value);
unsigned char MMA7455L_read_byte(unsigned char address);
unsigned int MMA7455L_read_word(unsigned char address);
signed char MMA7455L_read_axis_8(unsigned char axis);
signed int MMA7455L_read_axis_10(unsigned char axis);
MMA7455L.c
#include "MMA7455L.h"
void I2C_DIO_init(void)
{
GPIO_setAsPeripheralModuleFunctionOutputPin(I2C_port, (I2C_SDA_pin | I2C_SCL_pin));
}
void USCI_I2C_init(void)
{
USCI_B_I2C_initMasterParam I2C_param = {0};
I2C_DIO_init();
I2C_param.selectClockSource = USCI_B_I2C_CLOCKSOURCE_SMCLK;
I2C_param.i2cClk = UCS_getSMCLK();
I2C_param.dataRate = USCI_B_I2C_SET_DATA_RATE_100KBPS;
USCI_B_I2C_initMaster(USCI_B1_BASE, &I2C_param);
USCI_B_I2C_enable(USCI_B1_BASE);
}
void MMA7455L_init(void)
{
USCI_I2C_init();
MMA7455L_write_byte(MMA7455L_CTL1, 0x80);
MMA7455L_write_byte(MMA7455L_MCTL, MMA_7455_2G_MODE);
}
void MMA7455L_write_byte(unsigned char address, unsigned char value)
{
USCI_B_I2C_setSlaveAddress(USCI_B1_BASE, MMA7455L_address);
USCI_B_I2C_setMode(USCI_B1_BASE, USCI_B_I2C_TRANSMIT_MODE);
USCI_B_I2C_masterSendMultiByteStart(USCI_B1_BASE, address);
while(!USCI_B_I2C_masterIsStartSent(USCI_B1_BASE));
USCI_B_I2C_masterSendMultiByteFinish(USCI_B1_BASE, value);
while(USCI_B_I2C_isBusBusy(USCI_B1_BASE));
}
void MMA7455L_write_word(unsigned char address, unsigned int value)
{
unsigned char lb = 0x00;
unsigned char hb = 0x00;
lb = ((unsigned char)value);
value >>= 8;
hb = ((unsigned char)value);
MMA7455L_write_byte(address, lb);
MMA7455L_write_byte((address + 1), hb);
}
unsigned char MMA7455L_read_byte(unsigned char address)
{
unsigned char value = 0x00;
USCI_B_I2C_setSlaveAddress(USCI_B1_BASE, MMA7455L_address);
USCI_B_I2C_setMode(USCI_B1_BASE, USCI_B_I2C_TRANSMIT_MODE);
USCI_B_I2C_masterSendStart(USCI_B1_BASE);
USCI_B_I2C_masterSendSingleByte(USCI_B1_BASE, address);
USCI_B_I2C_setSlaveAddress(USCI_B1_BASE, MMA7455L_address);
USCI_B_I2C_setMode(USCI_B1_BASE, USCI_B_I2C_RECEIVE_MODE);
USCI_B_I2C_masterReceiveSingleStart(USCI_B1_BASE);
value = USCI_B_I2C_masterReceiveSingle(USCI_B1_BASE);
while(USCI_B_I2C_isBusBusy(USCI_B1_BASE));
return value;
}
unsigned int MMA7455L_read_word(unsigned char address)
{
unsigned char lb = 0x00;
unsigned int hb = 0x0000;
USCI_B_I2C_setSlaveAddress(USCI_B1_BASE, MMA7455L_address);
USCI_B_I2C_setMode(USCI_B1_BASE, USCI_B_I2C_TRANSMIT_MODE);
USCI_B_I2C_masterSendStart(USCI_B1_BASE);
USCI_B_I2C_masterSendSingleByte(USCI_B1_BASE, address);
USCI_B_I2C_setSlaveAddress(USCI_B1_BASE, MMA7455L_address);
USCI_B_I2C_setMode(USCI_B1_BASE, USCI_B_I2C_RECEIVE_MODE);
USCI_B_I2C_masterReceiveMultiByteStart(USCI_B1_BASE);
lb = USCI_B_I2C_masterReceiveMultiByteNext(USCI_B1_BASE);
hb = USCI_B_I2C_masterReceiveMultiByteFinish(USCI_B1_BASE);
USCI_B_I2C_masterReceiveMultiByteStop(USCI_B1_BASE);
while(USCI_B_I2C_isBusBusy(USCI_B1_BASE));
hb <<= 8;
hb |= lb;
return hb;
}
signed char MMA7455L_read_axis_8(unsigned char axis)
{
return ((signed char)MMA7455L_read_byte(axis));
}
signed int MMA7455L_read_axis_10(unsigned char axis)
{
return ((signed int)MMA7455L_read_word(axis) & 0x03FF);
}
ST7735.h
#include "driverlib.h" #include "delay.h" #define MOSI_port GPIO_PORT_P3 #define MISO_port GPIO_PORT_P3 #define CLK_port GPIO_PORT_P3 #define RST_port GPIO_PORT_P3 #define RS_port GPIO_PORT_P3 #define CS_port GPIO_PORT_P3 #define MOSI_pin GPIO_PIN0 #define MISO_pin GPIO_PIN1 #define CLK_pin GPIO_PIN2 #define RST_pin GPIO_PIN3 #define RS_pin GPIO_PIN4 #define CS_pin GPIO_PIN5 #define MOSI_pin_high() GPIO_setOutputHighOnPin(MOSI_port, MOSI_pin) #define MOSI_pin_low() GPIO_setOutputLowOnPin(MOSI_port, MOSI_pin) #define get_MISO_pin() GPIO_getInputPinValue(MISO_port, MISO_pin) #define CLK_pin_high() GPIO_setOutputHighOnPin(CLK_port, CLK_pin) #define CLK_pin_low() GPIO_setOutputLowOnPin(CLK_port, CLK_pin) #define RST_pin_high() GPIO_setOutputHighOnPin(RST_port, RST_pin) #define RST_pin_low() GPIO_setOutputLowOnPin(RST_port, RST_pin) #define RS_pin_high() GPIO_setOutputHighOnPin(RS_port, RS_pin) #define RS_pin_low() GPIO_setOutputLowOnPin(RS_port, RS_pin) #define CS_pin_high() GPIO_setOutputHighOnPin(CS_port, CS_pin) #define CS_pin_low() GPIO_setOutputLowOnPin(CS_port, CS_pin) #define ST7735_NOP 0x00 #define ST7735_SWRESET 0x01 #define ST7735_RDDID 0x04 #define ST7735_RDDST 0x09 #define ST7735_RDDPM 0x0A #define ST7735_RDD_MADCTL 0x0B #define STT7735_RDD_COLMOD 0x0C #define ST7735_RDDIM 0x0D #define ST7735_RDDSM 0x0E #define ST7735_SLPIN 0x10 #define ST7735_SLPOUT 0x11 #define ST7735_PTLON 0x12 #define ST7735_NORON 0x13 #define ST7735_INVOFF 0x20 #define ST7735_INVON 0x21 #define ST7735_GAMSET 0x26 #define ST7735_DISPOFF 0x28 #define ST7735_DISPON 0x29 #define ST7735_CASET 0x2A #define ST7735_RASET 0x2B #define ST7735_RAMWR 0x2C #define ST7735_RAMRD 0x2E #define ST7735_PTLAR 0x30 #define ST7735_TEOFF 0x34 #define ST7735_TEON 0x35 #define ST7735_MADCTL 0x36 #define ST7735_IDMOFF 0x38 #define ST7735_IDMON 0x39 #define ST7735_COLMOD 0x3A #define ST7735_RDID1 0xDA #define ST7735_RDID2 0xDB #define ST7735_RDID3 0xDC #define ST7735_RDID4 0xDD #define ST7735_FRMCTR1 0xB1 #define ST7735_FRMCTR2 0xB2 #define ST7735_FRMCTR3 0xB3 #define ST7735_INVCTR 0xB4 #define ST7735_DISSET5 0xB6 #define ST7735_PWCTR1 0xC0 #define ST7735_PWCTR2 0xC1 #define ST7735_PWCTR3 0xC2 #define ST7735_PWCTR4 0xC3 #define ST7735_PWCTR5 0xC4 #define ST7735_VMCTR1 0xC5 #define ST7735_RDID1 0xDA #define ST7735_RDID2 0xDB #define ST7735_RDID3 0xDC #define ST7735_RDID4 0xDD #define ST7735_PWCTR6 0xFC #define ST7735_GMCTRP1 0xE0 #define ST7735_GMCTRN1 0xE1 #define BLACK 0x0000 #define BLUE 0x001F #define RED 0xF800 #define GREEN 0x07E0 #define CYAN 0x07FF #define MAGENTA 0xF81F #define YELLOW 0xFFE0 #define WHITE 0xFFFF #define MADCTL_MY 0x80 #define MADCTL_MX 0x40 #define MADCTL_MV 0x20 #define MADCTL_ML 0x10 #define MADCTL_RGB 0x08 #define MADCTL_MH 0x04 #define ST7735_TFTWIDTH 128 #define ST7735_TFTLENGTH 160 #define CMD 0 #define DAT 1 #define SQUARE 0 #define ROUND 1 #define NO 0 #define YES 1 void SPI_DIO_init(void); void USCI_SPI_init(void); void ST7735_init(void); void ST7735_Write(unsigned char value, unsigned char mode); void ST7735_Reset(void); void ST7735_Word_Write(unsigned int value); void ST7735_Data_Write(unsigned char DataH, unsigned char DataL); void ST7735_Data_Write_4k(unsigned char DataH, unsigned char DataM, unsigned char DataL); void ST7735_Set_Addr_Window(unsigned char xs, unsigned char ys, unsigned char xe, unsigned char ye); void ST7735_RAM_Address_Set(void); void ST7735_Invert_Display(unsigned char i); unsigned int ST7735_Swap_Colour(unsigned int colour); unsigned int ST7735_Color565(unsigned char r, unsigned char g, unsigned char b); void ST7735_Set_Rotation(unsigned char m); void TFT_fill(unsigned int colour); void Draw_Pixel(unsigned char x_pos, unsigned char y_pos, unsigned int colour); void Draw_Line(signed int x1, signed int y1, signed int x2, signed int y2, unsigned int colour); void Draw_Rectangle(signed int x1, signed int y1, signed int x2, signed int y2, unsigned char fill, unsigned char type, unsigned int colour, unsigned int back_colour); void Draw_Circle(signed int xc, signed int yc, signed int radius, unsigned char fill, unsigned int colour); void Draw_Font_Pixel(unsigned char x_pos, unsigned char y_pos, unsigned int colour, unsigned char pixel_size); void print_char(unsigned char x_pos, unsigned char y_pos, unsigned char font_size, unsigned int colour, unsigned int back_colour, unsigned char ch); void print_str(unsigned char x_pos, unsigned char y_pos, unsigned char font_size, unsigned int colour, unsigned int back_colour, unsigned char *ch); void print_C(unsigned char x_pos, unsigned char y_pos, unsigned char font_size, unsigned int colour, unsigned int back_colour, signed int value); void print_I(unsigned char x_pos, unsigned char y_pos, unsigned char font_size, unsigned int colour, unsigned int back_colour, signed int value); void print_D(unsigned char x_pos, unsigned char y_pos, unsigned char font_size, unsigned int colour, unsigned int back_colour, unsigned int value, unsigned char points); void print_F(unsigned char x_pos, unsigned char y_pos, unsigned char font_size, unsigned int colour, unsigned int back_colour, float value, unsigned char points);
ST7735.c
#include "ST7735.h"
static const unsigned char fonts[96][5] =
{
{0x00, 0x00, 0x00, 0x00, 0x00} // 20
,{0x00, 0x00, 0x5f, 0x00, 0x00} // 21 !
,{0x00, 0x07, 0x00, 0x07, 0x00} // 22 "
,{0x14, 0x7f, 0x14, 0x7f, 0x14} // 23 #
,{0x24, 0x2a, 0x7f, 0x2a, 0x12} // 24 $
,{0x23, 0x13, 0x08, 0x64, 0x62} // 25 %
,{0x36, 0x49, 0x55, 0x22, 0x50} // 26 &
,{0x00, 0x05, 0x03, 0x00, 0x00} // 27 '
,{0x00, 0x1c, 0x22, 0x41, 0x00} // 28 (
,{0x00, 0x41, 0x22, 0x1c, 0x00} // 29 )
,{0x14, 0x08, 0x3e, 0x08, 0x14} // 2a *
,{0x08, 0x08, 0x3e, 0x08, 0x08} // 2b +
,{0x00, 0x50, 0x30, 0x00, 0x00} // 2c ,
,{0x08, 0x08, 0x08, 0x08, 0x08} // 2d -
,{0x00, 0x60, 0x60, 0x00, 0x00} // 2e .
,{0x20, 0x10, 0x08, 0x04, 0x02} // 2f /
,{0x3e, 0x51, 0x49, 0x45, 0x3e} // 30 0
,{0x00, 0x42, 0x7f, 0x40, 0x00} // 31 1
,{0x42, 0x61, 0x51, 0x49, 0x46} // 32 2
,{0x21, 0x41, 0x45, 0x4b, 0x31} // 33 3
,{0x18, 0x14, 0x12, 0x7f, 0x10} // 34 4
,{0x27, 0x45, 0x45, 0x45, 0x39} // 35 5
,{0x3c, 0x4a, 0x49, 0x49, 0x30} // 36 6
,{0x01, 0x71, 0x09, 0x05, 0x03} // 37 7
,{0x36, 0x49, 0x49, 0x49, 0x36} // 38 8
,{0x06, 0x49, 0x49, 0x29, 0x1e} // 39 9
,{0x00, 0x36, 0x36, 0x00, 0x00} // 3a :
,{0x00, 0x56, 0x36, 0x00, 0x00} // 3b ;
,{0x08, 0x14, 0x22, 0x41, 0x00} // 3c
,{0x02, 0x01, 0x51, 0x09, 0x06} // 3f ?
,{0x32, 0x49, 0x79, 0x41, 0x3e} // 40 @
,{0x7e, 0x11, 0x11, 0x11, 0x7e} // 41 A
,{0x7f, 0x49, 0x49, 0x49, 0x36} // 42 B
,{0x3e, 0x41, 0x41, 0x41, 0x22} // 43 C
,{0x7f, 0x41, 0x41, 0x22, 0x1c} // 44 D
,{0x7f, 0x49, 0x49, 0x49, 0x41} // 45 E
,{0x7f, 0x09, 0x09, 0x09, 0x01} // 46 F
,{0x3e, 0x41, 0x49, 0x49, 0x7a} // 47 G
,{0x7f, 0x08, 0x08, 0x08, 0x7f} // 48 H
,{0x00, 0x41, 0x7f, 0x41, 0x00} // 49 I
,{0x20, 0x40, 0x41, 0x3f, 0x01} // 4a J
,{0x7f, 0x08, 0x14, 0x22, 0x41} // 4b K
,{0x7f, 0x40, 0x40, 0x40, 0x40} // 4c L
,{0x7f, 0x02, 0x0c, 0x02, 0x7f} // 4d M
,{0x7f, 0x04, 0x08, 0x10, 0x7f} // 4e N
,{0x3e, 0x41, 0x41, 0x41, 0x3e} // 4f O
,{0x7f, 0x09, 0x09, 0x09, 0x06} // 50 P
,{0x3e, 0x41, 0x51, 0x21, 0x5e} // 51 Q
,{0x7f, 0x09, 0x19, 0x29, 0x46} // 52 R
,{0x46, 0x49, 0x49, 0x49, 0x31} // 53 S
,{0x01, 0x01, 0x7f, 0x01, 0x01} // 54 T
,{0x3f, 0x40, 0x40, 0x40, 0x3f} // 55 U
,{0x1f, 0x20, 0x40, 0x20, 0x1f} // 56 V
,{0x3f, 0x40, 0x38, 0x40, 0x3f} // 57 W
,{0x63, 0x14, 0x08, 0x14, 0x63} // 58 X
,{0x07, 0x08, 0x70, 0x08, 0x07} // 59 Y
,{0x61, 0x51, 0x49, 0x45, 0x43} // 5a Z
,{0x00, 0x7f, 0x41, 0x41, 0x00} // 5b [
,{0x02, 0x04, 0x08, 0x10, 0x20} // 5c ?
,{0x00, 0x41, 0x41, 0x7f, 0x00} // 5d ]
,{0x04, 0x02, 0x01, 0x02, 0x04} // 5e ^
,{0x40, 0x40, 0x40, 0x40, 0x40} // 5f _
,{0x00, 0x01, 0x02, 0x04, 0x00} // 60 `
,{0x20, 0x54, 0x54, 0x54, 0x78} // 61 a
,{0x7f, 0x48, 0x44, 0x44, 0x38} // 62 b
,{0x38, 0x44, 0x44, 0x44, 0x20} // 63 c
,{0x38, 0x44, 0x44, 0x48, 0x7f} // 64 d
,{0x38, 0x54, 0x54, 0x54, 0x18} // 65 e
,{0x08, 0x7e, 0x09, 0x01, 0x02} // 66 f
,{0x0c, 0x52, 0x52, 0x52, 0x3e} // 67 g
,{0x7f, 0x08, 0x04, 0x04, 0x78} // 68 h
,{0x00, 0x44, 0x7d, 0x40, 0x00} // 69 i
,{0x20, 0x40, 0x44, 0x3d, 0x00} // 6a j
,{0x7f, 0x10, 0x28, 0x44, 0x00} // 6b k
,{0x00, 0x41, 0x7f, 0x40, 0x00} // 6c l
,{0x7c, 0x04, 0x18, 0x04, 0x78} // 6d m
,{0x7c, 0x08, 0x04, 0x04, 0x78} // 6e n
,{0x38, 0x44, 0x44, 0x44, 0x38} // 6f o
,{0x7c, 0x14, 0x14, 0x14, 0x08} // 70 p
,{0x08, 0x14, 0x14, 0x18, 0x7c} // 71 q
,{0x7c, 0x08, 0x04, 0x04, 0x08} // 72 r
,{0x48, 0x54, 0x54, 0x54, 0x20} // 73 s
,{0x04, 0x3f, 0x44, 0x40, 0x20} // 74 t
,{0x3c, 0x40, 0x40, 0x20, 0x7c} // 75 u
,{0x1c, 0x20, 0x40, 0x20, 0x1c} // 76 v
,{0x3c, 0x40, 0x30, 0x40, 0x3c} // 77 w
,{0x44, 0x28, 0x10, 0x28, 0x44} // 78 x
,{0x0c, 0x50, 0x50, 0x50, 0x3c} // 79 y
,{0x44, 0x64, 0x54, 0x4c, 0x44} // 7a z
,{0x00, 0x08, 0x36, 0x41, 0x00} // 7b {
,{0x00, 0x00, 0x7f, 0x00, 0x00} // 7c |
,{0x00, 0x41, 0x36, 0x08, 0x00} // 7d }
,{0x10, 0x08, 0x08, 0x10, 0x08} // 7e ?
,{0x78, 0x46, 0x41, 0x46, 0x78} // 7f ?
};
static unsigned char width = ST7735_TFTWIDTH;
static unsigned char length = ST7735_TFTLENGTH;
void SPI_DIO_init(void)
{
GPIO_setAsPeripheralModuleFunctionInputPin(MISO_port, MISO_pin);
GPIO_setAsPeripheralModuleFunctionOutputPin(MOSI_port, MOSI_pin);
GPIO_setAsPeripheralModuleFunctionOutputPin(CLK_port, CLK_pin);
GPIO_setAsOutputPin(RST_port, RST_pin);
GPIO_setDriveStrength(RST_port, RST_pin, GPIO_FULL_OUTPUT_DRIVE_STRENGTH);
GPIO_setAsOutputPin(RS_port, RS_pin);
GPIO_setDriveStrength(RS_port, RS_pin, GPIO_FULL_OUTPUT_DRIVE_STRENGTH);
GPIO_setAsOutputPin(CS_port, CS_pin);
GPIO_setDriveStrength(CS_port, CS_pin, GPIO_FULL_OUTPUT_DRIVE_STRENGTH);
}
void USCI_SPI_init(void)
{
USCI_B_SPI_initMasterParam SPI_param = {0};
SPI_DIO_init();
SPI_param.selectClockSource = USCI_B_SPI_CLOCKSOURCE_SMCLK;
SPI_param.clockSourceFrequency = UCS_getSMCLK();
SPI_param.desiredSpiClock = 2000000;
SPI_param.msbFirst = USCI_B_SPI_MSB_FIRST;
SPI_param.clockPhase = USCI_B_SPI_PHASE_DATA_CAPTURED_ONFIRST_CHANGED_ON_NEXT;
SPI_param.clockPolarity = USCI_B_SPI_CLOCKPOLARITY_INACTIVITY_HIGH;
USCI_B_SPI_initMaster(USCI_B0_BASE, &SPI_param);
USCI_B_SPI_enable(USCI_B0_BASE);
}
void ST7735_init(void)
{
USCI_SPI_init();
ST7735_Reset();
ST7735_Write(ST7735_SWRESET, CMD);
delay_us(150);
ST7735_Write(ST7735_SLPOUT, CMD);
delay_us(150);
ST7735_Write(ST7735_FRMCTR1, CMD);
ST7735_Write(0x01, DAT);
ST7735_Write(0x2C, DAT);
ST7735_Write(0x2D, DAT);
ST7735_Write(ST7735_FRMCTR2, CMD);
ST7735_Write(0x01, DAT);
ST7735_Write(0x2C, DAT);
ST7735_Write(0x2D, DAT);
ST7735_Write(ST7735_FRMCTR3, CMD);
ST7735_Write(0x01, DAT);
ST7735_Write(0x2C, DAT);
ST7735_Write(0x2D, DAT);
ST7735_Write(0x01, DAT);
ST7735_Write(0x2C, DAT);
ST7735_Write(0x2D, DAT);
ST7735_Write(ST7735_INVCTR, CMD);
ST7735_Write(0x07, DAT);
ST7735_Write(ST7735_PWCTR1, CMD);
ST7735_Write(0xA2, DAT);
ST7735_Write(0x02, DAT);
ST7735_Write(0x84, DAT);
ST7735_Write(ST7735_PWCTR1, CMD);
ST7735_Write(0xC5, DAT);
ST7735_Write(ST7735_PWCTR2, CMD);
ST7735_Write(0x0A, DAT);
ST7735_Write(0x00, DAT);
ST7735_Write(ST7735_PWCTR3, CMD);
ST7735_Write(0x8A, DAT);
ST7735_Write(0x2A, DAT);
ST7735_Write(ST7735_PWCTR4, CMD);
ST7735_Write(0x8A, DAT);
ST7735_Write(0xEE, DAT);
ST7735_Write(ST7735_PWCTR5, CMD);
ST7735_Write(0x0E, DAT);
ST7735_Write(ST7735_VMCTR1, CMD);
ST7735_Write(0x00, DAT);
ST7735_Write(ST7735_COLMOD, CMD);
ST7735_Write(0x05, DAT);
ST7735_Write(ST7735_MADCTL, CMD);
ST7735_Write(0xC8, DAT);
ST7735_RAM_Address_Set();
ST7735_Write(ST7735_GMCTRP1, CMD);
ST7735_Write(0x02, DAT);
ST7735_Write(0x1C, DAT);
ST7735_Write(0x07, DAT);
ST7735_Write(0x12, DAT);
ST7735_Write(0x37, DAT);
ST7735_Write(0x32, DAT);
ST7735_Write(0x29, DAT);
ST7735_Write(0x2D, DAT);
ST7735_Write(0x29, DAT);
ST7735_Write(0x25, DAT);
ST7735_Write(0x2B, DAT);
ST7735_Write(0x39, DAT);
ST7735_Write(0x00, DAT);
ST7735_Write(0x01, DAT);
ST7735_Write(0x03, DAT);
ST7735_Write(0x10, DAT);
ST7735_Write(ST7735_GMCTRN1, CMD);
ST7735_Write(0x03, DAT);
ST7735_Write(0x1D, DAT);
ST7735_Write(0x07, DAT);
ST7735_Write(0x06, DAT);
ST7735_Write(0x2E, DAT);
ST7735_Write(0x2C, DAT);
ST7735_Write(0x29, DAT);
ST7735_Write(0x2D, DAT);
ST7735_Write(0x2E, DAT);
ST7735_Write(0x2E, DAT);
ST7735_Write(0x37, DAT);
ST7735_Write(0x3F, DAT);
ST7735_Write(0x00, DAT);
ST7735_Write(0x00, DAT);
ST7735_Write(0x02, DAT);
ST7735_Write(0x10, DAT);
ST7735_Write(ST7735_NORON, CMD);
delay_ms(10);
ST7735_Write(ST7735_DISPON, CMD);
delay_ms(100);
ST7735_Write(ST7735_RAMWR, CMD);
delay_ms(100);
}
void ST7735_Write(unsigned char value, unsigned char mode)
{
CS_pin_low();
if(mode != 0)
{
RS_pin_high();
}
else
{
RS_pin_low();
}
USCI_B_SPI_transmitData(USCI_B0_BASE, value);
while(USCI_B_SPI_isBusy(USCI_B0_BASE));
CS_pin_high();
}
void ST7735_Reset(void)
{
RST_pin_low();
delay_ms(2);
RST_pin_high();
delay_ms(2);
}
void ST7735_Word_Write(unsigned int value)
{
ST7735_Write(((value & 0xFF00) >> 0x08), DAT);
ST7735_Write((value & 0x00FF), DAT);
}
void ST7735_Data_Write(unsigned char DataH, unsigned char DataL)
{
ST7735_Write(DataH, DAT);
ST7735_Write(DataL, DAT);
}
void ST7735_Data_Write_4k(unsigned char DataH, unsigned char DataM, unsigned char DataL)
{
ST7735_Write(DataH, DAT);
ST7735_Write(DataM, DAT);
ST7735_Write(DataL, DAT);
}
void ST7735_Set_Addr_Window(unsigned char xs, unsigned char ys, unsigned char xe, unsigned char ye)
{
ST7735_Write(ST7735_CASET, CMD);
ST7735_Write(0x00, DAT);
ST7735_Write(xs, DAT);
ST7735_Write(0x00, DAT);
ST7735_Write(xe, DAT);
ST7735_Write(ST7735_RASET, CMD);
ST7735_Write(0x00, DAT);
ST7735_Write(ys, DAT);
ST7735_Write(0x00, DAT);
ST7735_Write(ye, DAT);
ST7735_Write(ST7735_RAMWR, CMD);
}
void ST7735_RAM_Address_Set(void)
{
ST7735_Set_Addr_Window(0x00, 0x00, 0x7F, 0x9F);
}
void ST7735_Invert_Display(unsigned char i)
{
if(i == ST7735_INVON)
{
ST7735_Write(ST7735_INVON, CMD);
}
else
{
ST7735_Write(ST7735_INVOFF, CMD);
}
}
unsigned int ST7735_Swap_Colour(unsigned int colour)
{
return ((colour <> 0x000B));
}
unsigned int ST7735_Color565(unsigned char r, unsigned char g, unsigned char b)
{
return (((r & 0xF8) << 0x08) | ((g & 0xFC) <> 0x03));
}
void ST7735_Set_Rotation(unsigned char m)
{
unsigned char rotation = 0x00;
ST7735_Write(ST7735_MADCTL, CMD);
rotation = (m % 4);
switch(rotation)
{
case 0:
{
ST7735_Write((MADCTL_MX | MADCTL_MY | MADCTL_RGB), DAT);
width = ST7735_TFTWIDTH;
length = ST7735_TFTLENGTH;
break;
}
case 1:
{
ST7735_Write((MADCTL_MY | MADCTL_MV | MADCTL_RGB), DAT);
width = ST7735_TFTLENGTH;
length = ST7735_TFTWIDTH;
break;
}
case 2:
{
ST7735_Write((MADCTL_RGB), DAT);
width = ST7735_TFTWIDTH;
length = ST7735_TFTLENGTH;
break;
}
case 3:
{
ST7735_Write((MADCTL_MX | MADCTL_MV | MADCTL_RGB), DAT);
width = ST7735_TFTLENGTH;
length = ST7735_TFTWIDTH;
break;
}
}
}
void TFT_fill(unsigned int colour)
{
unsigned char i = 0x00;
unsigned char j = 0x00;
ST7735_Set_Addr_Window(0, 0, (width - 1), (length - 1));
for(j = length; j > 0; j--)
{
for(i = width; i > 0; i--)
{
ST7735_Word_Write(colour);
}
}
}
void Draw_Pixel(unsigned char x_pos, unsigned char y_pos, unsigned int colour)
{
ST7735_Set_Addr_Window(x_pos, y_pos, (1 + x_pos), (1 + y_pos));
ST7735_Word_Write(colour);
}
void Draw_Line(signed int x1, signed int y1, signed int x2, signed int y2, unsigned int colour)
{
signed int dx = 0x0000;
signed int dy = 0x0000;
signed int stepx = 0x0000;
signed int stepy = 0x0000;
signed int fraction = 0x0000;
dy = (y2 - y1);
dx = (x2 - x1);
if (dy < 0)
{
dy = -dy;
stepy = -1;
}
else
{
stepy = 1;
}
if (dx < 0)
{
dx = -dx;
stepx = -1;
}
else
{
stepx = 1;
}
dx <<= 0x01;
dy < dy)
{
fraction = (dy - (dx >> 1));
while (x1 != x2)
{
if (fraction >= 0)
{
y1 += stepy;
fraction -= dx;
}
x1 += stepx;
fraction += dy;
Draw_Pixel(x1, y1, colour);
}
}
else
{
fraction = (dx - (dy >> 1));
while (y1 != y2)
{
if (fraction >= 0)
{
x1 += stepx;
fraction -= dy;
}
y1 += stepy;
fraction += dx;
Draw_Pixel(x1, y1, colour);
}
}
}
void Draw_Rectangle(signed int x1, signed int y1, signed int x2, signed int y2, unsigned char fill, unsigned char type, unsigned int colour, unsigned int back_colour)
{
unsigned char i = 0x00;
unsigned char xmin = 0x00;
unsigned char xmax = 0x00;
unsigned char ymin = 0x00;
unsigned char ymax = 0x00;
if(fill != NO)
{
if(x1 < x2)
{
xmin = x1;
xmax = x2;
}
else
{
xmin = x2;
xmax = x1;
}
if(y1 < y2)
{
ymin = y1;
ymax = y2;
}
else
{
ymin = y2;
ymax = y1;
}
for(; xmin <= xmax; ++xmin)
{
for(i = ymin; i <= ymax; ++i)
{
Draw_Pixel(xmin, i, colour);
}
}
}
else
{
Draw_Line(x1, y1, x2, y1, colour);
Draw_Line(x1, y2, x2, y2, colour);
Draw_Line(x1, y1, x1, y2, colour);
Draw_Line(x2, y1, x2, y2, colour);
}
if(type != SQUARE)
{
Draw_Pixel(x1, y1, back_colour);
Draw_Pixel(x1, y2, back_colour);
Draw_Pixel(x2, y1, back_colour);
Draw_Pixel(x2, y2, back_colour);
}
}
void Draw_Circle(signed int xc, signed int yc, signed int radius, unsigned char fill, unsigned int colour)
{
signed int a = 0x0000;
signed int b = 0x0000;
signed int p = 0x0000;
b = radius;
p = (1 - b);
do
{
if(fill != NO)
{
Draw_Line((xc - a), (yc + b), (xc + a), (yc + b), colour);
Draw_Line((xc - a), (yc - b), (xc + a), (yc - b), colour);
Draw_Line((xc - b), (yc + a), (xc + b), (yc + a), colour);
Draw_Line((xc - b), (yc - a), (xc + b), (yc - a), colour);
}
else
{
Draw_Pixel((xc + a), (yc + b), colour);
Draw_Pixel((xc + b), (yc + a), colour);
Draw_Pixel((xc - a), (yc + b), colour);
Draw_Pixel((xc - b), (yc + a), colour);
Draw_Pixel((xc + b), (yc - a), colour);
Draw_Pixel((xc + a), (yc - b), colour);
Draw_Pixel((xc - a), (yc - b), colour);
Draw_Pixel((xc - b), (yc - a), colour);
}
if(p < 0)
{
p += (0x03 + (0x02 * a++));
}
else
{
p += (0x05 + (0x02 * ((a++) - (b--))));
}
}while(a <= b);
}
void Draw_Font_Pixel(unsigned char x_pos, unsigned char y_pos, unsigned int colour, unsigned char pixel_size)
{
unsigned char i = 0x00;
ST7735_Set_Addr_Window(x_pos, y_pos, (x_pos + pixel_size - 1), (y_pos + pixel_size - 1));
for(i = 0x00; i < (pixel_size * pixel_size); i++)
{
ST7735_Word_Write(colour);
}
}
void print_char(unsigned char x_pos, unsigned char y_pos, unsigned char font_size, unsigned int colour, unsigned int back_colour, unsigned char ch)
{
unsigned char i = 0x00;
unsigned char j = 0x00;
unsigned char value = 0x00;
if(font_size < 1)
{
font_size = 1;
}
if(x_pos < font_size)
{
x_pos = font_size;
}
for (i = 0x00; i < 0x05; i++)
{
for (j = 0x00; j > j) & 0x01)
{
Draw_Font_Pixel(x_pos, y_pos, colour, font_size);
}
else
{
Draw_Font_Pixel(x_pos, y_pos, back_colour, font_size);
}
y_pos = y_pos + font_size;
}
y_pos -= (font_size < width)
{
x_pos = (font_size + 0x01);
y_pos += (font_size <= 0x20) && (*ch <= 0x7F));
}
void print_C(unsigned char x_pos, unsigned char y_pos, unsigned char font_size, unsigned int colour, unsigned int back_colour, signed int value)
{
unsigned char ch[5] = {0x20, 0x20, 0x20, 0x20, 0x20};
if(value 99) && (value 9) && (value = 0) && (value <= 9))
{
ch[1] = ((value % 10) + 0x30);
ch[2] = 0x20;
ch[3] = 0x20;
}
print_str(x_pos, y_pos, font_size, colour, back_colour, ch);
}
void print_I(unsigned char x_pos, unsigned char y_pos, unsigned char font_size, unsigned int colour, unsigned int back_colour, signed int value)
{
unsigned char ch[7] = {0x20, 0x20, 0x20, 0x20, 0x20, 0x20, 0x20};
if(value 9999)
{
ch[1] = ((value / 10000) + 0x30);
ch[2] = (((value % 10000)/ 1000) + 0x30);
ch[3] = (((value % 1000) / 100) + 0x30);
ch[4] = (((value % 100) / 10) + 0x30);
ch[5] = ((value % 10) + 0x30);
}
else if((value > 999) && (value 99) && (value 9) && (value 1)
{
ch[2] = (((value % 1000) / 100) + 0x30);
if(points > 2)
{
ch[3] = (((value % 100) / 10) + 0x30);
if(points > 3)
{
ch[4] = ((value % 10) + 0x30);
}
}
}
print_str(x_pos, y_pos, font_size, colour, back_colour, ch);
}
void print_F(unsigned char x_pos, unsigned char y_pos, unsigned char font_size, unsigned int colour, unsigned int back_colour, float value, unsigned char points)
{
signed long tmp = 0x0000;
tmp = (signed long)value;
print_I(x_pos, y_pos, font_size, colour, back_colour, tmp);
tmp = ((signed long)((value - (float)tmp) * 10000));
if(tmp = 10000) && (value = 1000) && (value = 100) && (value = 10) && (value < 100))
{
print_D((x_pos + (0x12 * font_size)), y_pos, font_size, colour, back_colour, tmp, points);
}
else if(value < 10)
{
print_D((x_pos + (0x0C * font_size)), y_pos, font_size, colour, back_colour, tmp, points);
if((value) < 0)
{
print_char(x_pos, y_pos, font_size, colour, back_colour, 0x2D);
}
else
{
print_char(x_pos, y_pos, font_size, colour, back_colour, 0x20);
}
}
}
main.c
#include "driverlib.h"
#include "delay.h"
#include "ST7735.h"
#include "MMA7455L.h"
void clock_init(void);
void main(void)
{
signed char x_axis_8 = 0;
signed char y_axis_8 = 0;
signed char z_axis_8 = 0;
WDT_A_hold(WDT_A_BASE);
clock_init();
ST7735_init();
MMA7455L_init();
ST7735_Set_Rotation(0x02);
TFT_fill(BLACK);
print_str(1, 100, 1, GREEN, BLACK, "X8:");
print_str(1, 110, 1, GREEN, BLACK, "Y8:");
print_str(1, 120, 1, GREEN, BLACK, "Z8:");
GPIO_setAsOutputPin(GPIO_PORT_P4,
GPIO_PIN7);
GPIO_setDriveStrength(GPIO_PORT_P4,
GPIO_PIN7,
GPIO_FULL_OUTPUT_DRIVE_STRENGTH);
while(1)
{
x_axis_8 = MMA7455L_read_axis_8(MMA7455L_X_out);
y_axis_8 = MMA7455L_read_axis_8(MMA7455L_Y_out);
z_axis_8 = MMA7455L_read_axis_8(MMA7455L_Z_out);
print_C(45, 100, 1, GREEN, BLACK, x_axis_8);
print_C(45, 110, 1, GREEN, BLACK, y_axis_8);
print_C(45, 120, 1, GREEN, BLACK, z_axis_8);
Draw_Circle(x_axis_8, x_axis_8, 2, YES, CYAN);
GPIO_toggleOutputOnPin(GPIO_PORT_P4,
GPIO_PIN7);
delay_ms(100);
Draw_Circle(x_axis_8, x_axis_8, 2, YES, BLACK);
};
}
void clock_init(void)
{
PMM_setVCore(PMM_CORE_LEVEL_3);
GPIO_setAsPeripheralModuleFunctionInputPin(GPIO_PORT_P5,
(GPIO_PIN4 | GPIO_PIN2));
GPIO_setAsPeripheralModuleFunctionOutputPin(GPIO_PORT_P5,
(GPIO_PIN5 | GPIO_PIN3));
UCS_setExternalClockSource(XT1_FREQ,
XT2_FREQ);
UCS_turnOnXT2(UCS_XT2_DRIVE_4MHZ_8MHZ);
UCS_turnOnLFXT1(UCS_XT1_DRIVE_3,
UCS_XCAP_3);
UCS_initClockSignal(UCS_FLLREF,
UCS_XT2CLK_SELECT,
UCS_CLOCK_DIVIDER_4);
UCS_initFLLSettle(MCLK_KHZ,
MCLK_FLLREF_RATIO);
UCS_initClockSignal(UCS_SMCLK,
UCS_XT2CLK_SELECT,
UCS_CLOCK_DIVIDER_4);
UCS_initClockSignal(UCS_ACLK,
UCS_XT1CLK_SELECT,
UCS_CLOCK_DIVIDER_1);
}
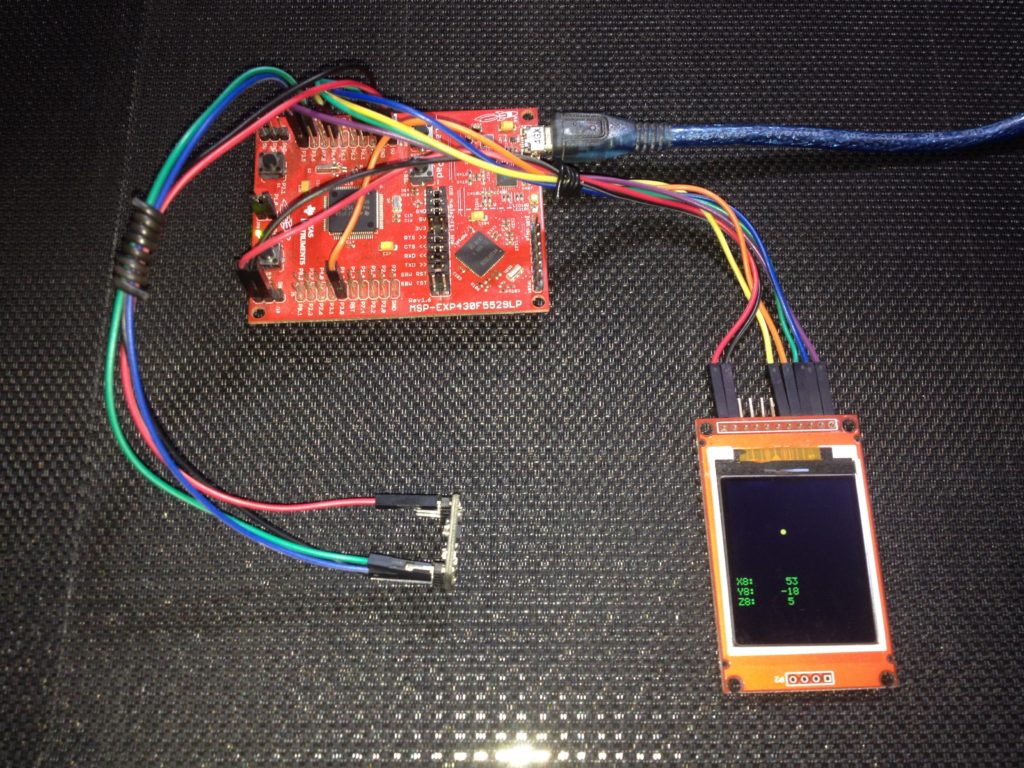
Hardware Setup
Explanation
Let’s check the I2C functions of USCI first. USCI B1 is used in I2C mode here. We start by setting alternative roles of I2C GPIO pins as shown below:
GPIO_setAsPeripheralModuleFunctionOutputPin(I2C_port, (I2C_SDA_pin | I2C_SCL_pin));
After setting the I2C pins, the I2C hardware is ready to be initialized.
void USCI_I2C_init(void)
{
USCI_B_I2C_initMasterParam I2C_param = {0};
I2C_DIO_init();
I2C_param.selectClockSource = USCI_B_I2C_CLOCKSOURCE_SMCLK;
I2C_param.i2cClk = UCS_getSMCLK();
I2C_param.dataRate = USCI_B_I2C_SET_DATA_RATE_100KBPS;
USCI_B_I2C_initMaster(USCI_B1_BASE, &I2C_param);
USCI_B_I2C_enable(USCI_B1_BASE);
}
For initialization, we need to set I2C module’s clock source first. In this case, the clock source is SMCLK. SMCLK, in this example, is running at 1 MHz as it is being sourced by prescaled XT2 clock source.
UCS_initClockSignal(UCS_SMCLK, UCS_XT2CLK_SELECT, UCS_CLOCK_DIVIDER_4);
We have to let the USCI I2C module know the speed of SMCLK and decide our I2C clock rate. Internal mechanism scales the I2C clock source to match the desired I2C data clock rate. Here we set the clock rate to 100 kbps.
After setting all these, we enable the USCI I2C module.
Note that no interrupt has been used as polling is good enough for basic I2C communication.
Now let’s check I2C write operations. Shown below are two types of I2C write operation functions. The first one is coded with driverlib and the other is what we usually do in other microcontrollers and in other software platforms. These are shown to highlight key differences.
void MMA7455L_write_byte(unsigned char address, unsigned char value)
{
USCI_B_I2C_setSlaveAddress(USCI_B1_BASE, MMA7455L_address);
USCI_B_I2C_setMode(USCI_B1_BASE, USCI_B_I2C_TRANSMIT_MODE);
USCI_B_I2C_masterSendMultiByteStart(USCI_B1_BASE, address);
while(!USCI_B_I2C_masterIsStartSent(USCI_B1_BASE));
USCI_B_I2C_masterSendMultiByteFinish(USCI_B1_BASE, value);
while(USCI_B_I2C_isBusBusy(USCI_B1_BASE));
}
The driverlib-based I2C write operation hides several stuffs in contrast to the operation shown below:
void MMA7455L_write_byte(unsigned char address, unsigned char value)
{
I2C_Start();
I2C_Write(MMA7455L_write_address);
I2C_Write(address);
I2C_Write(value);
I2C_Stop();
delay_ms(250);
}
Firstly, there is no I2C start and stop command in driverlib as these are hidden and done internally under the hood of driverlib functions. Secondly, we have to mention in our code if the I2C mode of data transaction is a transmission or a reception. Lastly, the I2C bus is polled for I2C bus status. The polling loops till the bus is free. I believe these differences are clear now.
Now let’s see the I2C read operations. Just like the write operations, we will again check differences between driverlib and conventional I2C bus reading method.
unsigned char MMA7455L_read_byte(unsigned char address)
{
unsigned char value = 0x00;
USCI_B_I2C_setSlaveAddress(USCI_B1_BASE, MMA7455L_address);
USCI_B_I2C_setMode(USCI_B1_BASE, USCI_B_I2C_TRANSMIT_MODE);
USCI_B_I2C_masterSendStart(USCI_B1_BASE);
USCI_B_I2C_masterSendSingleByte(USCI_B1_BASE, address);
USCI_B_I2C_setSlaveAddress(USCI_B1_BASE, MMA7455L_address);
USCI_B_I2C_setMode(USCI_B1_BASE, USCI_B_I2C_RECEIVE_MODE);
USCI_B_I2C_masterReceiveSingleStart(USCI_B1_BASE);
value = USCI_B_I2C_masterReceiveSingle(USCI_B1_BASE);
while(USCI_B_I2C_isBusBusy(USCI_B1_BASE));
return value;
}
The code snippet below shows conventional I2C bus read:
unsigned char MMA7455L_read_byte(unsigned char address)
{
unsigned char value = 0;
I2C_Start();
I2C_Write(MMA7455L_write_address);
I2C_Write(address);
I2C_Restart();
I2C_Write(MMA7455L_read_address);
value = I2C_Read(0);
I2C_Stop();
return value;
}
The key differences between these two code snippets above are similar as the ones we already noticed in I2C write codes. I stated similar because there are some new additions to these already existing differences. Firstly, note that there is no I2C restart or start function in driverlib as sending out slave address incorporates that in secret. Secondly, during an I2C read, there is a transmission and a reception session and so there are two USCI modes in a bus read operation. Lastly, note that read acknowledgement (ACK/NACK) is not manually sent in driverlib as again it is done under the hood.
I believe, by now, the driverlib concepts for I2C are clear.
Since we are using a TFT display as an external SPI device in this example and not reading it, we will just be focusing on SPI write operation only. Firstly, we declare all necessary GPIO pins.
#define MOSI_port GPIO_PORT_P3 #define MISO_port GPIO_PORT_P3 #define CLK_port GPIO_PORT_P3 #define RST_port GPIO_PORT_P3 #define RS_port GPIO_PORT_P3 #define CS_port GPIO_PORT_P3 #define MOSI_pin GPIO_PIN0 #define MISO_pin GPIO_PIN1 #define CLK_pin GPIO_PIN2 #define RST_pin GPIO_PIN3 #define RS_pin GPIO_PIN4 #define CS_pin GPIO_PIN5 #define MOSI_pin_high() GPIO_setOutputHighOnPin(MOSI_port, MOSI_pin) #define MOSI_pin_low() GPIO_setOutputLowOnPin(MOSI_port, MOSI_pin) #define get_MISO_pin() GPIO_getInputPinValue(MISO_port, MISO_pin) #define CLK_pin_high() GPIO_setOutputHighOnPin(CLK_port, CLK_pin) #define CLK_pin_low() GPIO_setOutputLowOnPin(CLK_port, CLK_pin) #define RST_pin_high() GPIO_setOutputHighOnPin(RST_port, RST_pin) #define RST_pin_low() GPIO_setOutputLowOnPin(RST_port, RST_pin) #define RS_pin_high() GPIO_setOutputHighOnPin(RS_port, RS_pin) #define RS_pin_low() GPIO_setOutputLowOnPin(RS_port, RS_pin) #define CS_pin_high() GPIO_setOutputHighOnPin(CS_port, CS_pin) #define CS_pin_low() GPIO_setOutputLowOnPin(CS_port, CS_pin)
We, then, initialize the GPIOs as per pin characteristics. SPI pins, just like I2C pins, are initialized as secondary function pins while the rest are initialized as ordinary GPIOs.
void SPI_DIO_init(void)
{
GPIO_setAsPeripheralModuleFunctionInputPin(MISO_port, MISO_pin);
GPIO_setAsPeripheralModuleFunctionOutputPin(MOSI_port, MOSI_pin);
GPIO_setAsPeripheralModuleFunctionOutputPin(CLK_port, CLK_pin);
GPIO_setAsOutputPin(RST_port, RST_pin);
GPIO_setDriveStrength(RST_port, RST_pin, GPIO_FULL_OUTPUT_DRIVE_STRENGTH);
GPIO_setAsOutputPin(RS_port, RS_pin);
GPIO_setDriveStrength(RS_port, RS_pin, GPIO_FULL_OUTPUT_DRIVE_STRENGTH);
GPIO_setAsOutputPin(CS_port, CS_pin);
GPIO_setDriveStrength(CS_port, CS_pin, GPIO_FULL_OUTPUT_DRIVE_STRENGTH);
}
Next, we initialize the USCI B0 module in SPI mode.
void USCI_SPI_init(void)
{
USCI_B_SPI_initMasterParam SPI_param = {0};
SPI_DIO_init();
SPI_param.selectClockSource = USCI_B_SPI_CLOCKSOURCE_SMCLK;
SPI_param.clockSourceFrequency = UCS_getSMCLK();
SPI_param.desiredSpiClock = 2000000;
SPI_param.msbFirst = USCI_B_SPI_MSB_FIRST;
SPI_param.clockPhase = USCI_B_SPI_PHASE_DATA_CAPTURED_ONFIRST_CHANGED_ON_NEXT;
SPI_param.clockPolarity = USCI_B_SPI_CLOCKPOLARITY_INACTIVITY_HIGH;
USCI_B_SPI_initMaster(USCI_B0_BASE, &SPI_param);
USCI_B_SPI_enable(USCI_B0_BASE);
}
The first part SPI module’s initialization is the initialization of required GPIOs.
Like I2C, we have to declare the source of SPI clock (here SMCLK), its frequency and the SPI clock speed. SPI needs additional info like clock polarity, clock phase and data orientation. These are also needed to be set.
After setting all these, we have our USCI SPI module ready to rock-&-roll.
SPI write is very simple and straight forward. We just have to write desired value(s) and wait for the SPI bus to get free. As we all know, for most SPI devices, chip select pin needs to be low prior to a read/write operation and high after completion of read/write. This is done here too.
void ST7735_Write(unsigned char value, unsigned char mode)
{
CS_pin_low();
if(mode != 0)
{
RS_pin_high();
}
else
{
RS_pin_low();
}
USCI_B_SPI_transmitData(USCI_B0_BASE, value);
while(USCI_B_SPI_isBusy(USCI_B0_BASE));
CS_pin_high();
}
The demo here reads a MMA7455L accelerometer and plots a circle on a ST7735 TFT display. The coordinates of the circle are based on the X-Y values of the accelerometer. The accelerometer’s axes values are also displayed.
Demo
|
|
Hello, dear sir Shawon Shahryiar, could you send me the GRACE program by email? I can’t find it anywhere on the Internet. Thank you very much and all the best.
https://www.dropbox.com/scl/fi/6jgmxuuwl9dw2zo9mpuwm/grace_setup_2.2.0.00006.rar?rlkey=gm20hy3odiuyajjow2pas3iz0&st=hhfakdjt&dl=0
Hello, what software are you using for the Hardware setup images and does it support simulation for the MSP430F5529
I used Proteus VSM for drawing schematics but it doesn’t support simulation.
Hi,
Im interfacing MSP430F5529 with MAX17055 fuel guage. while reading 16 bit value, the first byte im receiving is 0. so while reading multiple registers continuously the data exchange is happening, but im getting the correct data. Can anyone suggest me what will be the issue? why im getting 0 in first byte?
read16_bit data code:
uint16_t value = 0;
USCI_B_I2C_setslaveaddress(USCI_B1_BASE, slave_address);
USCI_B_I2C_setmode(USCI_B1_BASE, USCI_B_I2C_TRANSMIT_MODE);
USCI_B_I2C_masterSendStart(USCI_B1_BASE);
while (!USCI_B_I2C_masterSendStart(USCI_B1_BASE));
USCI_B_I2C_mastterSendSingleByte(USCI_B1_BASE, reg_address);
USCI_B_I2C_setslaveaddress(USCI_B1_BASE, slave_address);
USCI_B_I2C_setmode(USCI_B1_BASE, USCI_B_I2C_TRANSMIT_MODE);
USCI_B_I2C_masterReceiveMultiByteStart(USCI_B1_BASE);
uint8_t lb = USCI_B_I2C_masterReceiveMultiByteNext(USCI_B1_BASE);
uint8_t hb = USCI_B_I2C_masterReceiveMultiByteFinish(USCI_B1_BASE);
while (USCI_B_I2C_isBusBusy(USCI_B_BASE));
value = lb << 8;
value |= hb;
return value;
In code, after sending reg address, it will be recieve mode. its a type mistake
Hi, im trying to send the command from the terminal view. i can able to send the command and tried to blink p1.0 led in msp430f5529 controller, its working fine. And im using led driver IS31FL3236A interfaced with msp430f5529 controller, i can able to interface im getting the expected output.
now i need to send the command from seriak monitor based on that command i2c communication need to start. both communication are working fine, when it runs separately. its not working when i tried to combine.
any one had any idea, why it is happening or what will be the issue?
It could be due to:
1. conflicts in clock settings
2. hardware conflict like pin mapping
3. code is getting stuck or waiting for one communication line to finish
4. use of polling method instead of interrupt-driven coding
Hi, thank you for the respose.
Do I need to use different clock initialization for I2C and UART communication? if YES, can you explain how to do that?
I mean check which clock has been set for UART and I2C…. Is it SMCLK, MCLK, etc and is it tuned to right frequency required by the respective hardware?
Is there any example on how to implement polling method in uart?
Why go for polling method when it is a blocking method of coding? It is better to use interrupts instead at least for UART receive.
yes!! currently in my code, only for uart im using interrupts to recieve command from serial monitor. Im not using interrupt for I2C communication.
so the issue is must be in clock initialization. right?
For UART, im using USCI_A1_BASE. and for I2C, im using USCI_B1_BASE.
And another thing i need to ask is, in uart when i tried blink led(p1.0) in msp430f5529 by passing command. here, without clock I’m getting output. how it is possible?
And for both i2c and uart i gave SMCLK with 1Mhz
I am surprised and happy to find this tutorial on the F5529 as TI makes a lot of different devices.
Thank you very much for putting in the extra knowledge in each segment, made reading worthwhile.
Good Work!
lovely tutorial but to be honest I don’t think I’d be investing my time on this board to start with it’s not cheap and readily available as the stm32 boards can you please do more tutorials on stm32 board’s and the stc micros thanks
Hello, I try to program MSP430FR6047 but i get error “the debug interface to the device has been secured”. when flashing using uniflash and when program using CCS this happen. can you help me to solve this problem
You can try “On connect, erase user code and unlock the device” option.
Pingback: Tinkering TI MSP430F5529 – gStore
Hello
I am doing project of msp430g2553 interface(using i2c communication) with temp 100(temperature sensor) and try to read the temperature in dispaly(16*2) but didn’t get the out put (using code composer studio) can u share me any example code for this project
Thank you sir,
Which sensor? Did you use pullup resistors for SDA-SCL pins?
Where is lcd_print.h?
All files and docs are here:
https://libstock.mikroe.com/projects/view/3233/tinkering-ti-msp430f5529
You want the truth? TI makes and sell “underpowered micros”, you know? Low everything, not only the power but also peripherals. So the price is not justified.
Otherwise, if I’ll move there, I’ll introduce them to my small hobby projects – there are still some advantages.
I may even make a visual configuration tool of my own for them…
Yeah the prices of TI products are higher than other manufacturers but I don’t think the hardware peripherals are inferior.
Not inferior but in not enough numbers compared to STM32.
True